Man hittar idag mängder av intressanta elektroniska moduler som är relativt enkla att kombinera ihop till något man inte hittar färdigt på butikshyllan.
Jag köpte i slutet av senaste sommar en radiostyrd drönare (drone) av typen Dji Phantom 3 Professional. Jag betalade inte speciellt mycket för drönaren eftersom kameran inte fungerade. Det här blev en ny inkörsport till rc-flygandets värld, jag har sysslat med RC-flygande för kanske tjugo år sedan, och samtidigt ett intressant sätt att lära sig modernare teknik på området. Efter många om och men flyger nu drönaren och kameran fungerar men vissa störningar kan förekomma. Bildkvaliteten är god.

Fig. 1 Bilden är tagen med den reparerade drönaren ca. 50 m ovanför gårdsplanen till vårt hus på Sommarö i Esbo skärgård. Man ser Helsingfors i bakgrunden. Den vita röken kommer från ett kraftverk vid Drumsö bro.
Reparationen av drönaren gav inspiration till att eventuellt modifiera ett existerande RC flygplan med fast vinge så att förbränningsmotorn byts mot elmotor och kamera monteras så att flygaren kan beundra utsikten från flygplanet. Jag har ett lämpligt flygplan som bör vara lätt att modifiera. Ett elflygplan ger möjlighet att flyga betydligt friare än tidigare eftersom planet är väldigt tyst i jämförelse med en konventionell förbränningsmotor.
Jag har en hel del RC-servon i miljonlådan och de mekaniska komponenter jag behöver kan jag skriva ut på 3d-skrivare. Jag stötte på en enkel mycket vidvinklig kamera på en kinesisk vebbsida, på samma sida hittade jag en videosändare som sänder inom området 5.8 GHz samt en matchande mottagare som kan kopplas till dator och i princip mobiltelefon. Kameran kommer att av datorn uppfattas som en vebbkamera och det är möjligt att spela in videosignalen om så önskas. I princip borde samma sak gå att göra på mobiltelefonen men jag har någon typ av kompatibilitetsproblem som gör att telefonen inte åtminstone ännu fungerar som bildskärm.
Det första experimentet med kameran blir en jordbunden fjärrstyrd kamera som jag tänker studera våra rådjur med. Det springer en flock på 5-6 rådjur på området. Att bygga en radiostyrd kamera betyder att jag inte genast i försöksskedet slår sönder systemet … hoppas jag.
Fjärrstyrd viltkamera
Jag beslöt att använda två RC-servon för att styra kameran i sid- och i höjdled. Ett RC-servo monteras i systemets bas och styr kameran horisontellt. Ett annat servo monteras på en 3d-utskriven L-formad bit. Kameran är via en enkel adapter kopplad till detta servo som alltså vrider kameran i höjdled.
På den L-formade biten limmades två 3d-utskrivna fickor/hållare för videosändaren och ett styrkort för kameran.
Spänningsmatningen till systemet görs via en såkallad UBEC som är en chopper spänningsregulator som förvandlar en inspänning på 5,5 -27V till konstant 5V spänning som kameran, servona och RC-mottagaren behöver. En chopper/hackare har en mycket bättre verkningsgrad än en linjär spänningsregulator. En god verkningsgrad är speciellt viktig i ett RC-flygplan där mycket el behövs för drivmotorn.
Styrningen av kameran kan göras med en normal RC-sändare och matchande mottagare. Jag har åtminstone två sändare liggande som bör fungera.
Tillverkning av de mekaniska komponenterna
De mekaniska komponenterna konstruerades i programmet OpenScad som egentligen är ett programmeringsspråk för 3d-konstruktioner. Precis samma slutresultat fås naturligtvis också genom att använda ett CAD-program (det finns många gratisversioner) som kan generera STL-kod d.v.s. som kan översätta CAD-bilden till STL-kod som förstås av 3d-skrivarens styrprogram. För mig känns OpenScad bekvämt genom att jag har skrivit programkod i tiotals år. Ett CAD-program som jag använder sporadiskt och således hinner glömma kräver mera jobb än att skriva koden direkt. Det är självklart att det här kan verka konstigt för personer vana vid helt grafiskt konstruerande. OpenScad har ett relativt bekvämt användargränssnitt där jag i grafisk form kan se resultatet av kodskrivandet … skillnaden mot ett rent CAD program är eventuellt inte speciellt stor.
Styrprogrammet, i mitt fall ”RepetierHost”, använder ett ”slicer”-program som skivar konstruktionen i 0,2mm höga skivor som omvandlas till 0,2mm höga och 0,4mm breda plaststrängar som lager för lager bygger upp komponenten jag har skapat. Utskriften av de olika delarna tog 5 minuter till ca. en och en halv timme beroende av komponentens storlek. De större komponenterns skrevs ut med en fyllnadsgrad på 50% vilket betyder att komponenten inuti består till ca. 50% av luft. Delarna som kopplas till servona skrevs ut med en fyllnadsgrad på 100% för att göra dem möjligast styva och starka.

Fig. 2 Hållare för servot som vrider kameran i horisontell riktning. Uppe till vänster finns askens lock med plats för ett kullager som gör konstruktionen stadigare.
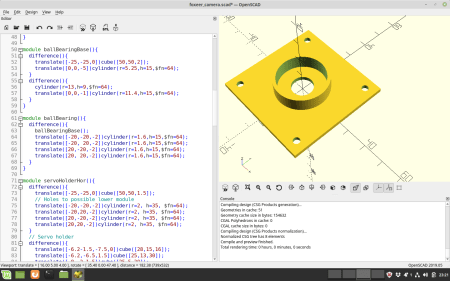
Fig. 3 Locket med plats för kullagret konstrueras med hjälp av två moduler.
Modulen (subrutinen) ballBearingBase() skapar den fyrkantiga bottenplattan med ett 10.5 mm hål i mitten. Detta görs så att en låda (cube) skapas från vilken man tar bort en cylinder med diametern 10.25 mm. Därefter skapas hållaren för kullagret d.v.s. den centrala ringstrukturen genom att lägga en cylinder med diametern 26 mm ovanpå den fyrkantiga plattan varefter man tar bort en cylinder med diametern 22.8 mm vilket leder till att endast ringstrukturen blir kvar.
Modulen ballBearing() använder sig av den tidigare skapade plattan med ringstruktur och hål i mitten och tar bort fyra cylindrar med radien 2 mm d.v.s. borrar fyra st 4 mm hål för fastsättningsskruvar. Skruvarna fästs så att man smälter fast fyra gängade mässingsholkar i lådans hörn.

Fig. 4 L-biten i vilken servot som vrider kameran i vertikalriktningen. Den lilla biten till vänster trycks fast i servots axel. Denna lilla bit limmas fast i L-bitens skåra närmast betraktaren. Orsaken till att det lönar sig att skriva ut den lilla biten separat är att det är mycket svårt att utan specialteknik skriva ut ”överhäng”. L-biten låg med servoöppningen mot skrivarens bottenplatta Det enda överhäng som fanns var skåran för limning av den lilla biten … detta klarar skrivaren utmärkt. Den lilla biten skrevs ut som på bilden.
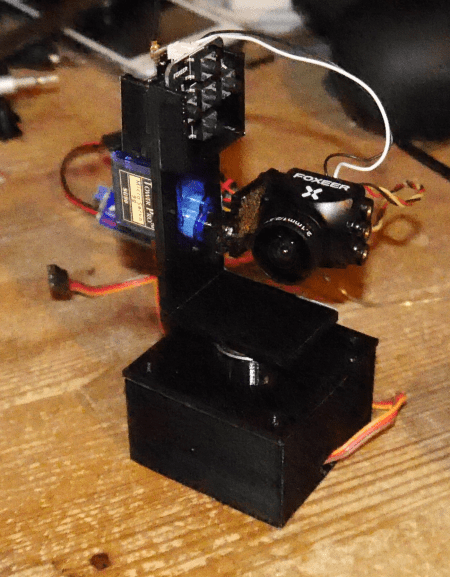
Fig. 5 Kameran komplett men utan RC-mottagare för styrning av servona. Jag väntar ännu på några delar.
Servot för styrning i horisontalriktning är den lilla blå komponenten till vänster om kameran. Ett likadant mikroservo används för att vrida hela L-delen horisontellt. Det horisontella vridservot finns inne i den fyrkantiga asken som till storleken motsvarar ungefär två små tändsticksaskar. Under den fyrkantiga lådan kommer det att monteras en ungefär lika stor ask i vilket jag monterar RC-mottagaren och spänningsregulatorn UBEC. Ovanför servot finns det hållare för två olika elektronikmoduler Närmast kameran ser man kamerans kontrollpanel med fem tryckknappar. Bakom kontrollpanelen finns videosändaren som sänder på 5.8 GHz. Man skymtar antennens bas (mässing). Hela antennen är ungefär 60 mm lång varav den aktiva delen utgör ungefär 30 mm. Den aktiva delen utgör sannolikt ungefär en halvvågsantenn. Våglängden vid 5.8 GHz är ungefär 52 mm.
Kamerans dimensioner är ca. 30 mm i riktningen för den optiska axeln i övrigt ungefär kvadratisk 25×25 mm.
De följande stegen
- Följande steg blir nu att fixa till ett batteripaket, jag har hittills använt ett laboratorienätaggregat.
- Skriv ut fastsättning som tillåter montering t.ex. mot en trädstam.
- Testa radiolänkens räckvidd. Jag förväntar mig åtminstone nåra hundra meters räckvidd vilket tillåter mig att ställa den portabla datorn i farstun och sitta inne i värmen medan jag tittar på rådjuren i skogen.
Jag återkommer med en senare artikel med bildmaterial på hur det hela fungerar i praktiken.

Lämna en kommentar