Jag älskar att fixa olika saker. I början av hösten köpte jag (billigt) en högklassig drönare alltså en radiostyrd helikopter med fyra rotorer. Drönaren är utrustad med GPS så att den flyger tillbaka till startpunkten om kontakten till den bryts. Den är också försedd med högupplösande kamera (4k HD) som är stabiliserad i tre riktningar och kan styras från marken. Det fanns dock ett litet men …

Fig. Drönaren Dji Phantom 3 Pro har en högupplösande kamera stabiliserad i tre axlar. Storleken framgår ur ”tändsticksasken” d.v.s. Samsung S6 mobiltelefonen av normalstorlek som är kopplad till styrenheten.
Drönaren hade kraschat vilket i sig inte är så ovanligt. Vid kraschen hade kamerans 3d upphängda kamera gått sönder så att en av de rörliga upphängningsarmarna hade gått av och de tunna kablar som styrde kameran och genom vilka kamerasignalen överfördes till drönaren för behandling hade slitits av.

Fig. Problembarnet kameran vridbar i tre riktningar och automatiskt stabiliserad så att drönarens rörelser t.ex. till följd av vindpustar kompenseras. Armen strax under kamerahuset i riktning NO på bilden hade brutits. Kameran motsvarar kvalitetsmässigt en riktig Go-Pro (mycket bättre än en kinesisk kopia).
Jag träffade försäljaren och kunde verifiera att drönaren flög utan problem men att kameran var helt död. En komplett begagnad kamera kostar $300 – $500 (utan verklig garanti att den fungerar) eller en ny från tillverkaren som är dyrare om en sådan finns att köpa men jag hoppades naturligtvis undvika det utlägget med teknisk analys/funderande och vid behov mikroreparation av elektroniken.
Den tidigare ägaren hade fixat kameraupphängningen och beställt flatkabelknippet men tydligen hade reparatören misslyckats med kopplingen till kamerans styrenhet. Då jag plockade isär kameran kunde man se att flatkabelkopplingarna på kamerans moderkort hade tagit stryk tydligen till följd av att reparatören hade missat att kablarna är låsta med ett snäpp … våld hade använts vilket i sådana här sammanhang alltid brukar vara mindre bra … för mig betydde det att jag kom över en mycket bättre drönare än jag hade kunnat drömma om. Nu gällde det att hitta en reservdel.

Fig. Kamerans moderkort. De två konnektorerna för (film) flatkablar ses uppe i NO. Ett begagnat moderkort som försäljaren påstår vara testat (tro det den som vill) kostar strax under $100.

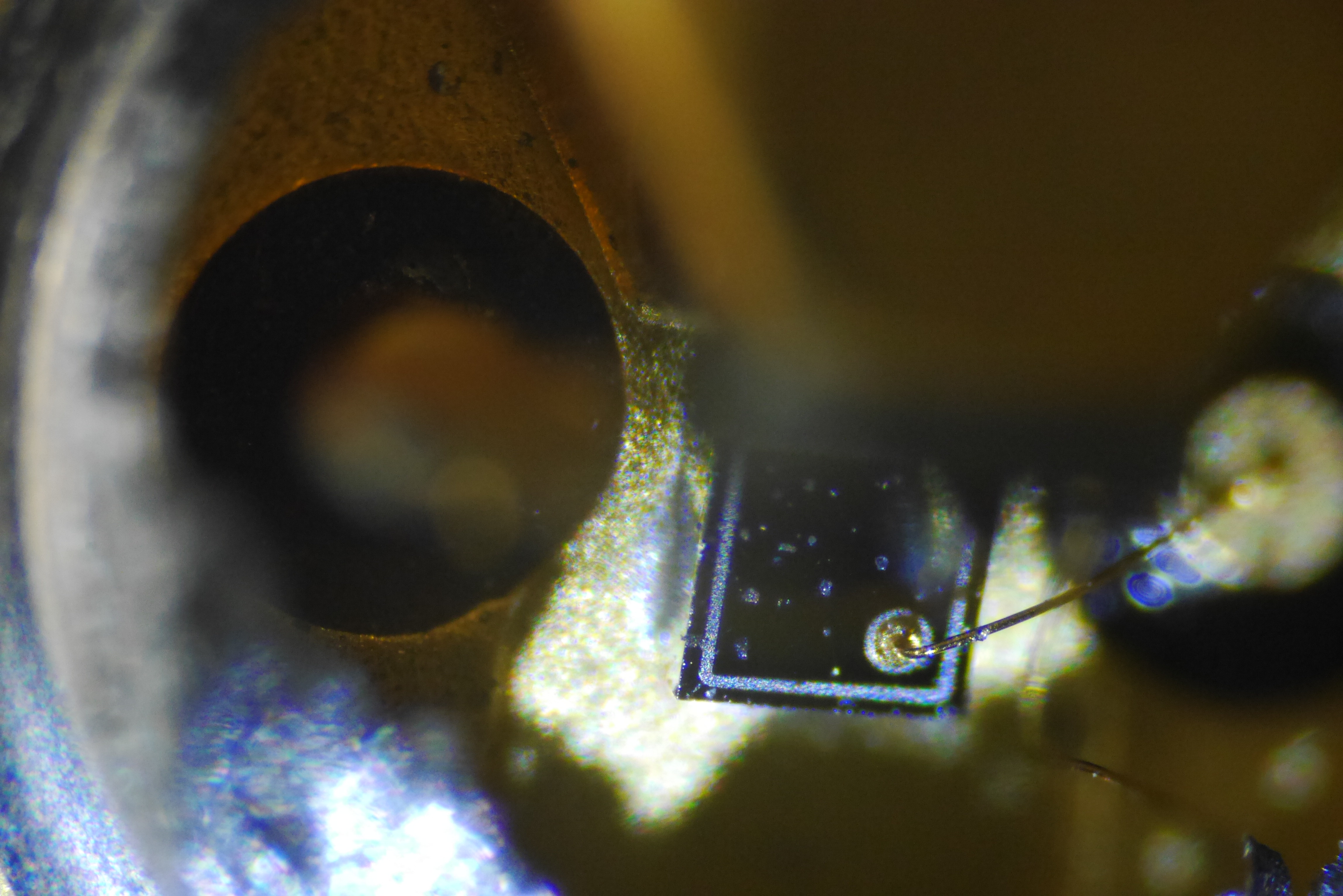
Fig. Man ser tydligt hur någon med skruvmejsel eller liknande har försökt peta loss den fastlåsta restbiten av flatkabeln, egentligen en flatkabel kopplad till två olika konnektorer. De svarta plastdelarna överst på konnektorerna är låsmekanismer. På bilden är låsen öppna. Avståndet mellan kontakterna i konnektorerna är endast 0,3 mm och kontaktstiften böjs mycket lätt varför petande med skruvmejsel inte är att rekommendera.
Det finns två sätt att försöka fixa problemet det överlägset billigaste skulle vara att byta flatkabelkonnektorerna på moderkortet. Att byta en ytmonterad komponent av denna typ skulle ha varit intressant och utmanande. Problemet är att jag inte trots rätt omfattande sökande hittade korrekt ytmonterad konnektor, dubbelsidig med 35 kontakter … tydligen rätt ovanlig. Avskriver reparation av moderkortet för tillfället och börjar söka alternativ på nätet. Hittar jag en lämplig konnektor så fixar jag kortet som en övning i att löda ytmonterade komponenter.
Det visade sig att det finns ett antal säljare både i Kina och i USA som säljer begagnade delar till den här drönarmodellen. Jag beställde ett billigt kort från Kina samt ett lite dyrare i princip identiskt kort från USA. Kortet från USA kom inklusive skal och motor varför det var ok att betala lite mera … nu har jag en motor i reserv. Det kan vara skäl att notera att drönaren Dji Phantom 3 finns i flera modeller. De enklare modellerna har en mindre avancerad kamera och ett enklare moderkort. Skillnaden rent utseendemässigt är att Pro-versionens kort har två flatkabelkonnektorer medan de billigare varianterna har endast en. Det är alltså skäl att kontrollera att den del man beställer är kompatibel med den drönare den skall användas till.
Jag fick det kinesiska kortet först. Lite lödande/petande med förstoringsglas krävdes för att hitta kontakterna till den lilla fläkt som kyl kortet. Kontakterna är mycket små och gömda under en limklick … inget större problem. Efter bytet av kort så kände systemet tydligt igen kameran som kalibrerade sig själv då man slog på strömmen men jag fick ingen bild och drönaren meddelade att kamerans programvara måste uppdateras. Slutsatsen är att någon signal mellan kortet och kameran hade saknats till följd av de skadade kontakterna. Systemet angav att kamerans programvara var version 1.03.0020+ där ”+” tydligen anger att någon programmodul inte är kompatibel och sannolikt från någon nyare varsion.
Det verkade alltså klart att systemet i något skede hade nedgraderats d.v.s. man hade backat mjukvaran till en tidigare version men att detta hade misslyckats. Jag såg kommentarer på nätet att någon av de nyaste versionerna av programvaran bl.a. införde flygförbud över t.ex. idrottsplatser något som slog hårt mot vissa professionella användare vilka av denna orsak försökte nedgradera mjukvaran med dåligt resultat. Notera alltså att drönaren själv med hjälp av GPS i princip håller koll på var det är tillåtet att flyga. Det verkar sannolikt att vissa moduler inte kan backas vilket gör kameran oanvändbar så länge programvaran innehåller konflikter. Min uppfattning är att många av de moderkort som cirkulerar på nätet sannolikt är helt i skick men de är resultat av misslyckade uppgraderingar som har lett till att användaren har gett upp och köpt kortet som reservdel från tillverkaren, mera om detta senare.
Jag försökte först uppgradera kameran till den nyaste versionen av programvaran men stötte ideligen på problem d.v.s. systemet meddelade att uppgraderingen misslyckades. Orsaken var eventuellt att kamerasystemet överhettades då det var igång en längre stund (en uppgradering går på ca. 30 min) , vid flygning kommer kamerapaketet att kylas av luftdraget från propellrarna. Jag hittade av en slump en kommentar på nätet som konstaterade att det lönar sig att kyla elektroniken under uppgraderingen. Jag tog en liten datorfläkt som jag kopplade till en justerbar strömkälla så att jag kontinuerligt kylde kamerapaketet med fläkten … nu började uppgraderingarna fungera bättre men jag fick fortfarande ”+” varianter och uppgraderingarna krävde mycket lång tid … mycket längre än den angivna 25-30 min.
I det här skedet anlände kortet från USA och jag satte in det kortet i stället eftersom jag inte helt litade på den kinesiska säljaren. Problemet kunde ju vara att det kort jag fick från Kina var defekt. Sannolikt fungerar det kinesiska kortet korrekt. Det nya kortet fungerade igen genast så att kameran kalibrerade sig själv … men ingen bild överfördes till kontrollenhetens display och … programvarans version var 1.03.0020+ (smile, oh shit)!
Efter en hel del experimenterande med olika programversioner, det gick åt mycket tid, beslöt jag att försöka starta uppgradering från den äldsta version jag hade tillgänglig och inte bry mig om att en uppgradering misslyckades utan helt enkelt stegvis gå vidare från version till version.
Det kan vara skäl att notera att det finns odokumenterade hjälpmedel för uppgraderingen. Det går att få mer detaljerade felmeddelanden gällande uppgraderingen genom att kopiera en tom fil med namnet P3X_FW_DEBUG till roten på SD-kortet med den nya mjukvaran. Jag kan också försöka tvinga systemet att göra uppgradering trots konflikter genom att medan jag slår på strömmen till drönaren håller reset intryckt (litet hål i sidan av stommen). På SD kortet finns den nya mjukvarufilen samt eventuellt P3X_FW_DEBUG inga andra filer får finnas. Det kan vara skäl att formatera SD-kortet mellan olika försök så att det inte blir kvar skrot från tidigare försök formatet skall vara FAT32 (inte NTFS för windows).
Jag fick många ”+” varianter på vägen men jag gissade att pluset skulle försvinna då jag kom upp till den version från vilken den alltför nya ”+” versionen hörde hemma. Mot slutet av en serie uppgraderingar så började plötsligt kameramodulen ge alarm beep-beep-… något den inte hade gjort tidigare men som den enligt instruktionerna borde ge vid misslyckad uppgradering. Jag upprepade då uppgraderingen för den version som gav felmeddelande och fortsatte sedan uppgraderingarna och plötsligt meddelade systemet att uppgraderingen var OK. Om jag minns rätt så var det den nästsista versionen som meddelade att uppgraderingen hade lyckats.
Jag provade versionen tillsammans med fjärrkontrollen och nu fick jag bild till mobiltelefonen som var kopplad till fjärrkontrollen. Fjärrkontrollen meddelade nu att kamerans programvara måste uppgraderas ytterligare varefter jag laddade in den sista versionen … nu fungerade länken till fjärrkontrollen men de bilder jag tog med drönarens kamera var strimmiga, förvridna och oanvändbara.
Videolänken fungerar men bilder på SD-kortet förvrängs
Jag misstänkte nu, delvis efter andra användares diskussioner på nätet, att problemet var SD-minneskortet. En 4k HD kamera (högupplösande TV kvalitet) skickar ofantliga datamängder till SD-kortet. Eftersom systemet omformar videoströmmen till lågupplösande video som skickas över radio till fjärrkontrollen (720p) och dessutom lagrar en annan videoström till SD-kortet så kan man gissa att allting måste tajma perfekt. Det finns inga resurser till onödiga felkontroller.
Jag hade först testat standard SD-kort av klass 10 d.v.s. samma typ av kort som jag har använt i min systemkamera (Pentax K3 och K5) utan problem. Resultat: Endast störningar, video helt svart och stänger av sig efter någon sekund.
Följande försök var SanDisk Ultra 16GB från två olika försäljare (det finns alltid risk för förfalskningar). Resultatet var marginellt bättre men fortfarande helt oanvändbart.

Fig. Användning av ett SunDisk Ultra 16GB gav det här resultatet. Man kan se hur några linjer verkar lagras någorlunda korrekt överst i bilden därefter blir det problem … gissningsvis flödar kameraenhetens buffert över då systemet inte hinner dumpa data till SD-kortet. Situationen blir antagligen ännu mycket värre vid video då dataströmmarna är mycket större.
Nästa kort var ett SanDisk Extreme Pro 64GB. Stillbilder gick nu bra att känna igen men det fanns kraftiga horisontella linjer. Mätning av detta korts snabbhet visade att det borde ha fungerat … marginellt.
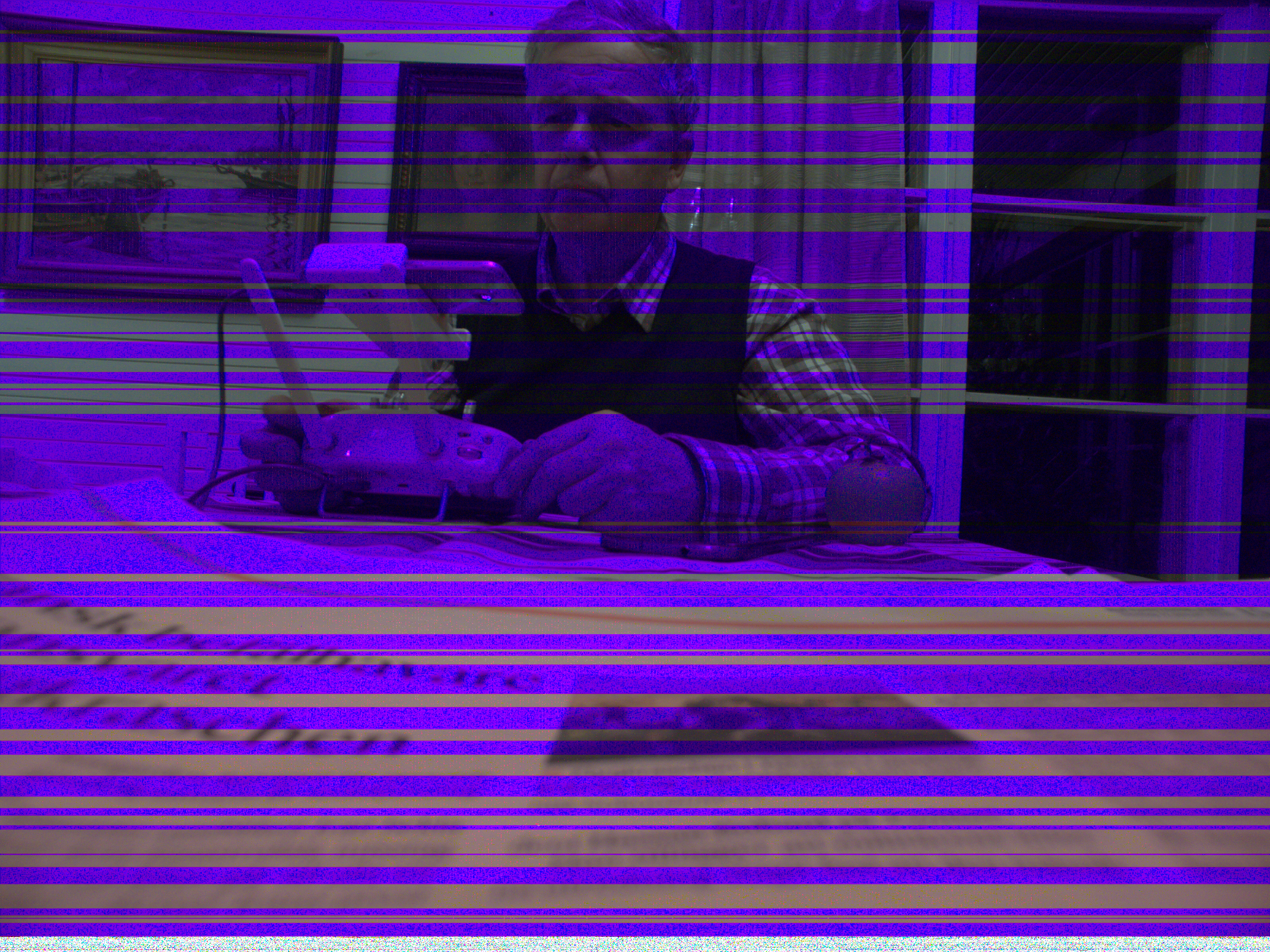
Fig. Störningar då ett marginellt långsamt SD-kort används. Långsammare kort visar endast en smal rand av bilden överst.
Följande kort var ett 64GB SanDisk Extrem från en kamerabutik specialiserad på kameror och drönare. Plötsligt fungerar systemet! Jag kan fortfarande se slumpmässiga störningar ibland men systemet kör och kan kan både ta stillbilder och videofilma. Det blir antagligen skäl att ytterligare experimentera med olika snabba SD-kort men jag kan leva med systemet som det ser ut nu!
Minneskortens begränsningar
Observera!
Mätningarna har uppdaterats eftersom minneskortsläsaren var undermålig. Mätningarna visade läsarens begränsningar för de snabba korten. Jag bytte till en Kingston MobileLite G4 för USB3. Resultatet förändrades rätt mycket.
Rött-svart SanDisk Extreme PRO 64 GB verkar (ibland) gå att filma upp till 2700K. Fungerar allmänt taget sämre än nedanstående Extreme kort.
Rött-guld SanDisk Extreme 64GB verkar gå att filma upp till 2700P dock så att slumpmässiga störningar kan ses.
Rött-grått SanDisk Ultra 16GB verkar gå att filma på 720P samma kommentar som föregående kort.
Mätningar:

Fig. Röd-Svart SanDisk SD minne mätt med hjälp av Linux Mint ”Disk” verktyg. Notera hur skriv och läshastigheten är bra medan åtkomsttiden varierar inom relativt vida gränser. Är den opålitliga åtkomsttiden problemet då kortet används på en DJI Phantom 3 Professional?

Fig. Röd-guld SanDisk Extreme. Skriv- och läshastigheten är i princip densamma som hos PRO versionen ovan medan åtkomsttiden är mycket bättre. Skrivhastigheten är något lägre än föregående kort men kortet fungerar bättre i drönaren. Är orsaken att åtkomsttiden är bättre på detta kort medan skrivhastigheten fortfarande är adekvat? Detta kort fungerar någorlunda.

Fig. Röd-grått SanDisk Ultra 16GB. Notera att skrivhastigheten är betydligt lägre än de stora SanDisk minnena. Detta kort verkar kunna spela in på 720P vilket tyder på att åtkomsttiden är tillräckligt bra medan överföringshastigheten inte räcker till för högupplösande video. Notera dock de stora kasten i åtkomsttid.

Fig. Billigt namnlöst kort 8 GB från kina. Skrivhastigheten är bättre än för SanDisk 16GB medan åtkomsttiden är betydligt sämre. Jag har inte testat kortet i drönaren eftersom jag utgår från att det inte fungerar. Notera de intressanta variationerna i skrivhastighet mot slutet av testet.

Fig. Kingston 16GB minneskort. Läshastigheten är OK men skrivhastigheten och åtkomsttiden är erbarmlig. Notera att det förekommer mycket förfalskningar av SD-kort vilket betyder att detta kan vara en förfalskning. Kortet är inte testat i drönaren.

Fig. Biltema 8GB är inte alls speciellt dåligt. Åtmomsttiden är dock inte speciellt bra och det finns enstaka mycket långa åtkomsttider. Kortet är inte testat i drönaren.
Jag kommer inom den närmaste framtiden att uppdatera ovanstående mätningar med något Lexar-kort (som bör vara snabbt).
Video. Man kan se att det ännu finns vissa problem som jag antar beror på SD-kortet. Det blir aktuellt att fortsätta att söka efter ett snabbt SD-kort både vad gäller skrivhastighet och åtkomsttid.
Ryckigheten i vid panorering är en följd av att jag har för lite erfarenhet av att flyga drönaren. Störningarna gissar jag är en följd av enstaka störningar med lång åtkomsttid till SD-kortet… se fig för Rött-Guld SD-kort.