Det är alltid kul att lära sig något nytt och att tvingas motionera de små grå cellerna innanför det grå håret med problemlösning och felsökning av något man aldrig har lekt med tidigare.
Det är snart påsk igen, som baha’i ser jag fram mot baha’i nyår Naw Ruz … i båda fallen har ägg en plats i måltiderna i anslutning till dessa högtider. Det är för övrigt intressant att se hur många sedvänjor med en ursprungligen Zoroastrisk bakgrund (från det antika Persien) lever kvar i olika sedvänjor från Afghanistan till Spanien. Sedvänjorna har helt enkelt modifierats så att de passar ihop med den lokala religionen varefter man kan glömma varifrån sedvänjorna kommer.
I den Nordiska traditionen hör ägg, ofta snyggt målade, till påsktraditionen. Man färgar ägg på olika sätt. Själv minns jag hur man kokade ägg tillsammans med lämpliga växter för att ge äggen en trevlig färg. Senare har jag många gånger ritat figurer på ägg tillsammans med barnen. Vad är då naturligare än att använda moderna hjälpmedel för att göra mera avancerade utsmyckningar t.ex. i form av geometriska mönster som är alltför arbetsdryga eller komplicerade för att göras för hand.
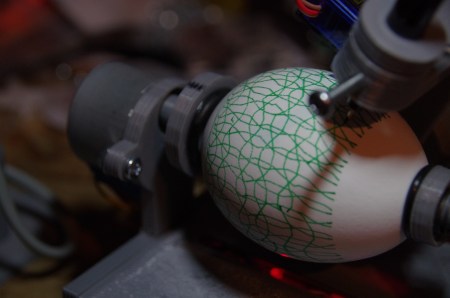
Videon ovan visar en Ägg skrivare som dock ser relativt komplicerad ut 🙂 . Det här projektet använder dock betydligt bättre, och dyrare stegmotorer än vad jag använde.
Jag hittade en variant som kan skrivas ut med 3d skrivare och som såg snygg och väl genomtänkt ut. Bygget av den varianten och problem i anslutning till detta bygge beskrivs i den här artikeln. Jag utgick från den här äggplottern:
Vad behöver jag för projektet
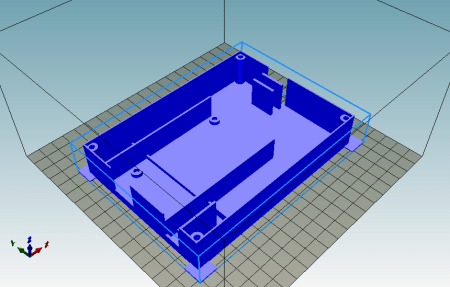
Filerna som behövs för 3d utskrift av mekaniken hittar man på thingiverse i form av en stl-fil. Stl är en beskrivning av hur de mekaniska delar som skall skrivas ut med 3d skrivare ser ut. Innan skrivaren kan skriva ut komponenten måste stl-filen vidarebehandlas av ett lämpligt program som skär upp föremålet i en serie skikt som 3d skrivaren sedan kan rita ut skikt för skikt och på såsätt långsamt bygga upp hela det föremål som skrivs ut. Jag använder programmet slic3r för att vidarebehandla stl-filen. Skrivarprogrammet jag använder är Repetier-Host V1.6.2.
Problem #1
Min 3d skrivare klarar av att skriva ut föremål med dimensionerna ca. 200x200x200 mm³. Det visade sig att alla delar till Ägg skrivaren fanns i samma fil som kräver en betydligt större skrivare än den jag har. Alternativen är då att antingen hitta någon firma med en skrivare med tillräckligt stor byggyta … eller att modifiera stl-filen så att bitarna kan skrivas ut på min skrivare. Jag valde det senare alternativet.
Då jag själv konstruerar föremål som skall skrivas ut på 3d skrivare så använder jag programspråket openscad för att designa föremålen. Jag kan enkelt läsa in en stl-fil i openscad:
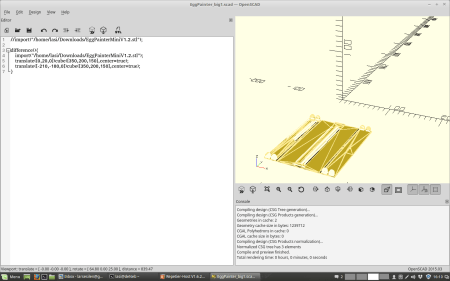
Jag använder helt enkelt kommandot import( … ); för att läsa in stl-filen som ett enda stort föremål. Därefter använder jag kommandot difference() på den inlästa filen och använder stora lådor (klossar) som skär bort de delar jag för tillfället inte vill se. Det spelar inte någon roll på vilket område på skärmen den kvarvarande delen finns, den centreras automatiskt av skrivaren.
Jag klippte söner stl-filen i tre olika föremålsgrupper d.v.s. skalet blev två olika bitar och de små mekaniska delarna blev en egen grupp. De olika beskurna delarna skrevs sedan ut separat. Jag antar att motsvarande funktionalitet finns i de flesta CAD-program som stöder 3d utskrift.
Utöver plastdelarna behövde jag två stycken små kullager, skruvar i olika dimensioner som jag klippte till lämpliga längder med hjälp av en Abico-tång. Lager hittade jag på en lokal järnaffär och skruvar har jag på lager i olika dimensioner.
Hopplockning av styrelektroniken
Skalet är konstruerat för en Arduino UNO med stor USB (typ B) kontakt. Jag har olika varianter av processorkortet på lager så jag valde helt enkelt en som fysiskt var kompatibel med en Arduino Uno. Processorkortet kostar kanske sex dollar på ebay.
Ett litet RC-servo av lämplig storlek hittade jag i miljonlådan (Tower Pro micro servo 9g). Ett servo kan beställas från ebay för någon dollar.
Jag hittade stegmotorn inklusive drivkort ULN2003 hos en elektronikaffär i Åbo och beställde den över nätet (https://www.triopak.fi/fi).
Jag monterade styrelektroniken utan att ännu bygga in den i det 3d utskrivna skalet. Jag ville enkelt kunna testa servot och stegmotorerna utan att ideligen öppna skalet på apparaten. Det började nu dyka upp problem …
Problem #2
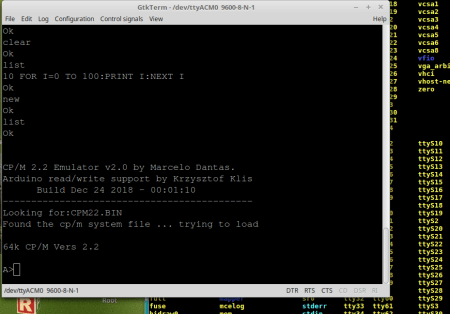
Jag kunde utan problem kompilera drivprogrammet och ladda ner det på Arduinokortet. Då jag försökte få kontakt med äggskrivaren genom programmet Inkscape dök det upp problem. Ritprogrammet Inkscape för vilket det finns en tilläggsdel för att driva äggskrivaren verkade inte över huvudtaget kunna se Arduinoprocessorn.
Problemet visade sig bero på att då jag via min dator försöker komma i kontakt med Arduinon så skickar datorn via USB en DTR signal (data terminal ready) som på UNO är kopplad till Reset d.v.s. UNOn startade om då jag öppnade kommunikationen mot UNO. I sig är detta inget problem, jag behöver bara vänta på att Arduino Uno startar om varefter linjen är öppen och bör fungera i fortsättningen.
På en linuxdator söker Inkscape efter äggskrivaren genom att öppna en serieförbindelse i taget varefter programmet väntar på att UNO startar om varefter Inkscape skriver ‘v\r\n’ d.v.s. ber om äggskrivarens versionsinformation. Om svaret kommer inom en vettig tid så vet Inkscape var äggskrivaren finns och kan börja skicka kommandon till skrivaren. Orsaken till problemet är att en Linuxdator har tillgång till en stor mängd potentiella serieportar ocxh det krävs lång tid för att beta av alla portar … så lång tid att jag gav upp 😉 . Den lösning jag fastnade för var att läsa av om Arduino Uno var kopplad till min dator. Detta kan kontrolleras med hjälp av kommandot:
lsusb
Bus 002 Device 005: ID 248a:8367
Bus 002 Device 004: ID 046d:c52b Logitech, Inc. Unifying Receiver
Bus 002 Device 060: ID 1a86:7523 QinHeng Electronics HL-340 USB-Serial adapter
Bus 002 Device 002: ID 1a40:0101 Terminus Technology Inc. Hub
Bus 002 Device 001: ID 1d6b:0002 Linux Foundation 2.0 root hub
Bus 004 Device 001: ID 1d6b:0001 Linux Foundation 1.1 root hub
Bus 001 Device 001: ID 1d6b:0002 Linux Foundation 2.0 root hub
Bus 003 Device 001: ID 1d6b:0001 Linux Foundation 1.1 root hub
Man kan enkelt identifiera den egna anslutna USB-enheten i mitt fall Arduino Uno-kortet genom att först ge kommandot lsusb utan att kortet är anslutet varefter man ansluter kortet och ger kommandot på nytt. Den nya rad som dyker upp innehåller den kod jag vill ha. Jag har märkt ut den aktuella raden med fet stil ovan.
Kommandot listar alla USB anslutna apparater på datorn. I princip har UNOn en unik identifikationsadress. Jag modifierade Inkscapes sökprogram så att det först tittade efter min specifika Arduino UNO innan den försöker söka igenom alla andra serieportar. Äggskrivaren hittas nu snabbt och bekvämt utan problem.
Eggbot tilläggsdelen för Inkscape finns i en linuxdator i katalogen:
~/.config/inkscape/extensions
Programmet jag modifierade var: ~/.config/inkscape/extensions/ebb_serial.py .
Jag lade in mitt Arduino UNOs id i raden:
if port[2].startswith(”USB VID:PID=1A86:7523”):
Koden 1A86:7523 fick jag från lsusb-kommandot ovan.
Problemet med att Arduino UNO startar om då en yttre enhet försöker ansluta över USB kan elimineras genom att bryta en förbindelse på kretskortet om Arduinon är en äkta Arduino Uno. I mitt fall är det fråga om en kopia från vilken man har lämnat bort den här egenskapen. Nackdelen med att kapa ifrågavarande hopptråd är att programmeringen blir besvärligare. Inom ca. en sekund efter att man börjar ladda upp program till Arduinon måste man trycka på reset på Arduinokortet … reset-tryckningen har eliminerats i Arduino Uno genom att låta DTR sköta saken men då dyker det upp ovanstående problem.
Problem #3
Min ena stegmotor av typen 28BYJ-48 var defekt. Stegmotorn råkade vara kopplad till armen som styrde pennan. Något kugghjul inne i motorns kuggväxel (64 ggr nedväxling) är defekt vilket leder till att motorn stoppar i ett specifikt läge. Jag bytte ut motorn varefter det fungerade.
Problem #4
Då jag testade stegmotorerna med en verklig bild genom Inkscape så visade det sig att motorerna gick relativt varma och de snurrade endast i en riktning. Orsaken var att instruktionerna för hur styrsignalerna fron Arduino skulle kopplas till drivkortet var felaktiga. In/ut pinnarna 2,3,4,5 styr IN1, IN2, IN3 och IN4 på stegmotorns drivkort. Det visade sig att jag för korrekt funktion måste kasta om pinnarna 3 och 4. Kopplingen till stegmotorn blev då:
pin 2 –> IN1
pin4 –> IN2
pin3 –> IN3
pin5 –> IN4
På mitsvarande sätt måste pinnarna för den andra stegmotorn kopplas:
pin 8 –> IN1 (drivkort #2)
pin10–> IN2
pin9 –> IN3
pin11–>IN4

Bilden visar processorkortet Artduino UNO till vänster (blått) samt två stegmotordrivkort (vita) baserade på kretsen ULN2003. Drivkorten är inget stegmotorkontrollkort utan uttryckligen en serie transistorer som kan kopplas på och av under processorkontroll. Arduinin kontrollerar bitmönstret för varje steg. För att en stegmotor skall stega måste en serie bestämda bitmönster genereras som genererar önskade magnetfält inne i stegmotorn och bitmönstrena måste skickas till motorn i korrekt ordning och ordningsföljden byter om man vill backa …
En stegmotorkontroller behöver egentligen endast två signaler steg och riktning en kontrollkrets kan oftast också justera strömmen genom stegmotorn vilket kan användas till bl.a. att justera motorns effekt och motorns temperatur. En riktig stegmotorkontroller innehåller egen intelligens och den genererar själv korrekta bitmönster för stegning framåt och bakåt. Det finns avancerade stegmotorkontrollers som också på egen hand klarar av att accelerera och decelerera. Man kan inte abrupt ändra stegfrkvensen på en stegmotor eftersom den då kan tappa bort steg vilket blir pinsamt om maskinen som styrs inte mäter den exakta positionen … vilket i allmänhet inte görs om man använder stegmotorer.
De fyrpoliga sladdarnas ledare i mitten (på de vita korten eller på arduino men inte båda) måste kastas om för att stegmotorn skall stega i båda riktningarna.
Efter att ett antal gånger ha plockat ihop äggskrivaren och sedan isär igen började grundfunktionerna se korrekta ut. Hålen i de 3d utskrivna mekaniska bitarna tenderade att vara för små vilket krävde filande samt varmluftsblåsare. Då ett hål nästan är korrekt kan man värma komponenten varefter man pressar på den med milt våld varvid passningen blir exakt. Någon bit värmde jag så mycket att den ändrade form vilket löstes genom att skriva ut en ny bit.
Ägghållaren vid rotationsstegmotorn använder en O-ring som friktionsyta mot ägget. Vid den fria axeländan som är kullagrad finns motsvarande något mindre O-ringsyta som trycks mot ägget med hjälp av en metallfjäder. Metallfjäderns längd kan justeras med hjälp av en mellanbricka som kan skrivas ut med 3d skrivare i olika tjocklekar. Tanken är att ägget skall vara stadigt monterat men man får inte trycka så hårt att ägget går sönder. Det är extremt viktigt att ägget inte rör sig medan äggskrivaren skriver eftersom detta dödar all precision. Mer om injustering senare i artikeln. Jag är inte övertygad om att min konstreuktion som använder O-ringar nödvändigtvis fungerar speciellt bra. Tiden får utvisa och då måste något annat system prövas.

Pennans drivmekanik. Den lilla stegmotorn till höger i bilden vrider pennan kring centrum av ägget. Vi ser den vita servoarmen som används för att höja/sänka pennan. Pennan trycks mot ägget av dess egen tyngd. Vi ser o-ringen vid rotationsmotorn som fungerar som friktionsyta för att hålla ägget på plats. Den fjäderbelastade hållaren för äggets spetsiga ända syns nere till höger.

Äggskrivaren sedd från en annan vinkel. Observera att pennans lyftservo är monterat på den vertikala armen som är monterad på stegmotorn i mitten.
Arbetsprocess för att rita på ett ägg
Vi använder programmet Inkscape som är ett öppet källkodsprogram som finns att ladda ner gratis för Windows, Masc och Linux. Jag kör sedan många år endast Linux och jag har inte ens Windows installerad på mina två arbetsmaskiner. Nedanstående är inte någon ingående instruktion för hur man använder Inkscape. Det finns goda instruktioner för detta om man googlar Inkscape.
Då vi monterar ägget är det viktigt att det är möjligast väl centrerat vilket vi kan kontrollera t.ex genom att utan penna vrida ägget ett varv. Detta kan vi enkelt göra genom att skapa en Inkscape bild med storleken 4070×800. Från dokumentets vänstra kant till dokumentets högra kant dras en rät linje mitt på dokumentet. Använd View/Zoom Out så att hela bildytan kan ses då strecket ritas från kant till kant. Om vi utan penna ”skriver ut” detta dokument så kommer ägget att vridas 360 grader runt sin axel. Genom att hålla ett lämpligt föremål som referens mot skrivarbasen kan vi kolla om avståndet mellan referensföremålet hålls konstant genom varvet eller om avståndet varierar. Om vi sder betydande variationer lönar det sig att försiktigt flytta ägget vid någondera ändan så att felet blir så litet som möjligt. Det lönar sig att experimentera.

En hjälpbild som består av endast ett enda streck tvärs över bilden kan användas till att kontrollera att ägget roterar precis ett varv och att det sitter korrekt monterat utan att kasta av och an då det roterar.
Under Extensions/Eggbot/ hittar vi EggBot control. Med denna kontroll kan vi kontrollera att lyftning/sänkning av penna fungerar samt skriva ut en bild i Inkscape. Vi börjar med att skriva ut (utan penna) vår räta linje för att kontrollera att ägget är centrerat och att det roterar precis ett varv.
Vi öppnar nu ett nytt dokument antingen så att vi skapar det själv eller så att vi laddar ner ett mönster vi gillar från nätet. Vi måste nu justera bildens storlek så att den precis fyller hela ägget utan att överlappa. För min skrivare med 28BYJ-48 stegmotorer och ULM2003 styrkretsar skall dokumentets storlek sättas till ungefär 4070(bredd) x 800 (höjd). Den bild vi har läst in kan manuellt justeras till den bredd vi vill ha.
Ett test av utskrift från Inkscape visar att skrivaren i princip fungerar men det är extremt viktigt att:
- Ägget centreras korrekt så att det inte blir några kast då det roterar
- Pennan ställs in till lämplig höjd så att den ritar också vid ytterlägena
- Pennan ställs i mittläge innan ritningen påbörjas. Det finns annars risk för att pennan slår i ägghållaren i ändläget vilket kan lösgöra ägget delvis så att det gungar av och an.
Provritning gav resultatet nedan vilket inte ännu är så bra.
Då man tittar noga på bilden ser man att det är en springa mellan ägget och tjockändans O-ring vilket gör att denna ända av ägget abrupt hoppar av och an med intressanta resultat vid utritningen. Jag glömde att dra fast skruven som håller pennan vilket ledde till att pennan gungade av och an beroende av pennans rörelseriktning.
Jag kommer att modifiera tjockändans fastsättning för att åtgärda felen. Jag är helt optimistisk på att skrivaren ännu kommer att fungera helt OK.
Tack till alla kända och okända på nätet som har lagt ner mycket arbete på både utveckling av programvara och hårdvara.
Den extremt billiga och samtidigt kompakta stegmotorn 28BYJ-48 är inte bra till följd av att den är utväxlad. Kugghjulen i kuggväxeln är aldrig perfekta och speciellt i en sådan här billig motor så finns det glapp d.v.s. om vi ritar en linje i en rörelseriktning och sedan byter riktning så kommer det att finnas ett obestämt område till följd av glapp. Lösningen skulle vara bättre stegmotorer som inte är utväxlade men detta betyder samtidigt att en stor del av mekaniken måste förnyas. Byter man stegmotorerna så får man dock mycket bättre exakthet vid ritandet.
Modifierad fastsättning av ägget
Jag konstaterade ovan att ägget gungade av och an i upphängningen gjord av O-ringar. Orsaken var att O-ringens dimension i förhållande till ägget blev fel. Ägget låg antagligen delvis direkt mot ändplattan vilket gjorde att det kunde glida sidlänges vilket i sin tur gjorde ritandet mycket inexakt.
Jag hittade röda flaskkorkar av gummi (se bild nedan). I finland är det här traditionella korkar som man speciellt hittar på hösten vid saftningstider. Jag köpte en påse korkar och klippte sönder en som blev en ca. 7 mm djup mjuk ägghållare. Resultatet blev mycket bra och precisionen förbättrades radikalt.

Med den modifierade hållaren blir ritandet reproducerbart, räta linjer som går runt hela ägget träffar startpunkten igen efter ett varv … något som inte hände tidigare.

Notera den 3d utskrivna pennhållaren. Jag skrev också ut en hållare för tre pennor i vilka pennorna kan förvaras utan kork. Den extra pennadaptern gör det mycket enklare att montera pennerna exakt och lika för alla pennor.
Planerade vidare modifiationer
Det finns fortfarande ett tydligt kännbart glapp i pennans stegmotor till följd av stegmotorns växellåda med utväxlingen 1:64 d.v.s. stegmotorn roterar 64 varv då den utgående axeln roterar ett varv.
Jag beställde en Nema 13 stegmotor som har ungefär samma dimensioner som den nu använda 28BYJ-48 men helt utan utväxling. Då jag får stegmotorn så planerar jag att först köra den med den existerande drivkretsen och om det fungerar OK så använder jag den. Alternativet är att jag byter ULN2003 drivkortet mot en kontroller av den typ som finns i dagens 3d-skrivare. Exempelvis A4988 eller DRV8825 av vilka jag uppfattar den senare som marginellt bättre.
En stegmotor av annan typ kommer att kräva modifikation av ritarmen d.v.s. jag blir tvungen att designa en egen variantmed något annorlunda dimensioner. Fastsättningen av armen i stegmotoraxeln kommer att säkras med skruv vilket inte är falllet nu.
Beslutar jag mig för att byta ut stegmotorkontrollern så blir jag antagligen tvungen att skriva ut en modifierad bottenplatta eftersom A4988 och DRV8825 saknar skruvhål och därför kräver en annan fastsättning.
Några källor:
Byggbeskrivningen för den här presenterade Egg Painter Mini.
Den ursprungliga EggBot skrivaren.










{kind=link}
{kind=link}